 한국어
한국어





























PLEASE SELECT THE DESTINATION COUNTRY AND LANGUAGE :

| 상품코드 | P5033-I33 |
|---|---|
| 제조사 | CHINA |
| 판매가 | 45,000원 (부가세 미포함) |
| 배송비 | 3,500원 (77,000원 이상 구매 시 무료) |
| SNS 상품홍보 | |
|---|

 |
(최소주문수량 1개 이상 / 최대주문수량 0개 이하)
사이즈 가이드수량을 선택해주세요.
위 옵션선택 박스를 선택하시면 아래에 상품이 추가됩니다.
| 상품명 | 상품수 | 가격 |
|---|---|---|
| 광학식 위치인식센서(Optical flow sensor) (P5033) |


|
45000 ( |
할인가가 적용된 최종 결제예정금액은 주문 시 확인할 수 있습니다.
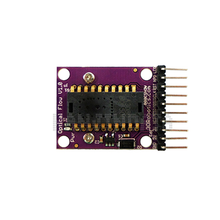
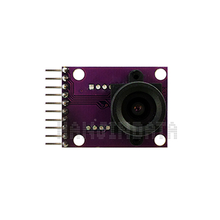
ADNS3080 마우스 센서와 렌즈가 결합된 제품으로 장애물 회피나 수평고도 홀드에 주로 사용됩니다. APM2.5보드, 아두이노등에 연결하여 사용하실 수 있으며, 드론(DRONE)에 활용 가능합니다.
Sensor’s x and y values can be converted to real distances based on altitude
In order to convert values from the sensor to real distances moved, we need to take into account the altitude. This is necessary because as you can see from the two pictures below, if we have two quads moving the same distance, but one at a low altitude, the other at a higher altitude, the lower quad will see surface features appear to move further and this will result in a higher optical flow values
We compensate for vehicle roll and pitch changes
Change in the vehicle’s roll and pitch will also cause changes in the x and y values returned by the sensor. Unlike the lateral movement calculations these are not dependent upon the distance of the visible objects. In the picture below you can see that as the quad has rolled 10 degrees but both flowers have moved from the center of the camera’s view in the 1st pic to the edge of the view in the 2nd pic.
The expected change in sensor values can be calculated directly from the change in roll and pitch given the formula below. We subtract these expected changes from the real values returned by the sensor.
Once we have the x/y movements we can integrate these values over time with the current yaw to arrive at an estimate of position.
<아두이노 예제코드>
// Test the ADNS3080 Optical Flow Sensor
// based on: Example of AP_OpticalFlow library by Randy Mackay. DIYDrones.com
//
#include "SPI.h"
#include "ADNS3080.h"
#define AP_SPI_DATAIN 12 //MISO
#define AP_SPI_DATAOUT 11 //MOSI
#define AP_SPI_CLOCK 13 //SCK
#define ADNS3080_CHIP_SELECT 10 //SS
#define ADNS3080_RESET 9 //RESET
byte orig_spi_settings_spcr;
byte orig_spi_settings_spsr;
int _cs_pin=ADNS3080_CHIP_SELECT;
int _reset_pin=1; // set to 1 if you have reset connected
unsigned int last_update;
boolean _overflow=false;
boolean _motion=false;
int raw_dx;
int raw_dy;
unsigned int surface_quality;
void setup()
{
Serial.begin(115200);
Serial.println("www.bot-thoughts.com\nOptical Flow test program V1.0\n");
delay(1000);
// flowSensor initialization
if( initOF() == false )
Serial.println("Failed to initialise ADNS3080");
delay(1000);
}
void loop()
{
int value;
display_menu();
// wait for user to enter something
while( !Serial.available() ) {
delay(20);
}
// get character from user
value = Serial.read();
switch( value ) {
case 'c' :
//display_config();
break;
case 'f' :
//set_frame_rate();
break;
case 'i' :
// display image
display_image();
break;
case 'I' :
display_image_continuously();
break;
case 'm' :
display_motion();
break;
case 'r' :
// set resolution
//set_resolution();
break;
case 's' :
//set_shutter_speed();
break;
case 'z' :
//flowSensor.clear_motion();
break;
case '\r' : // ignore return type characters
case '\n' :
break;
default:
Serial.println("unrecognised command");
Serial.println();
break;
}
}
/////////////////////////////////////////////////////////////////////////////////////////////////////////////
// DISPLAY FUNCTIONS
/////////////////////////////////////////////////////////////////////////////////////////////////////////////
// Prints out a list of functions.
void display_menu()
{
Serial.println();
Serial.println("please choose from the following options:");
// Serial.println(" c - display all config");
// Serial.println(" f - set frame rate");
Serial.println(" i - display image");
Serial.println(" I - display image continuously");
Serial.println(" m - display motion");
// Serial.println(" r - set resolution");
// Serial.println(" s - set shutter speed");
// Serial.println(" z - clear all motion");
// Serial.println(" a - frame rate auto/manual");
Serial.println();
}
// Captures and displays image from flowSensor
void display_image()
{
Serial.println("image data --------------");
print_pixel_data(&Serial);
Serial.println("-------------------------");
}
// display_image - captures and displays image from flowSensor flowSensor
void display_image_continuously()
{
int i;
Serial.println("press any key to return to menu");
Serial.flush();
while( !Serial.available() ) {
display_image();
i=0;
while( i<20 && !Serial.available() ) {
delay(100); // give the viewer a bit of time to catchup
i++;
}
}
Serial.flush();
}
// show x,y and squal values constantly until user presses a key
//
void display_motion()
{
boolean first_time = true;
Serial.flush();
// display instructions on how to exit
Serial.println("press x to return to menu..");
delay(1000);
while( !Serial.available() ) {
updateOF();
// check for errors
if( _overflow )
Serial.println("overflow!!");
// x,y,squal
Serial.print("dx: ");
Serial.print(raw_dx,DEC);
Serial.print("\tdy: ");
Serial.print(raw_dy,DEC);
Serial.print("\tsqual:");
Serial.print(surface_quality,DEC);
Serial.println();
first_time = false;
// short delay
delay(100);
}
// flush the serial
Serial.flush();
}
/////////////////////////////////////////////////////////////////////////////////////////////////////////////
// ADNS3080 SPECIFIC FUNCTIONS
/////////////////////////////////////////////////////////////////////////////////////////////////////////////
// reset sensor by holding a pin high (or is it low?) for 10us.
void reset()
{
// return immediately if the reset pin is not defined
if( _reset_pin == 0)
return;
digitalWrite(_reset_pin,HIGH); // reset sensor
delayMicroseconds(10);
digitalWrite(_reset_pin,LOW); // return sensor to normal
}
// Read a register from the sensor
byte read_register(byte address)
{
byte result = 0, junk = 0;
backup_spi_settings();
// take the chip select low to select the device
digitalWrite(_cs_pin, LOW);
// send the device the register you want to read:
junk = SPI.transfer(address);
// small delay
delayMicroseconds(50);
// send a value of 0 to read the first byte returned:
result = SPI.transfer(0x00);
// take the chip select high to de-select:
digitalWrite(_cs_pin, HIGH);
restore_spi_settings();
return result;
}
// init - initialise sensor
// initCommAPI parameter controls whether SPI interface is initialised (set to false if other devices are on the SPI bus and have already initialised the interface)
boolean initOF()
{
int retry = 0;
pinMode(AP_SPI_DATAOUT,OUTPUT);
pinMode(AP_SPI_DATAIN,INPUT);
pinMode(AP_SPI_CLOCK,OUTPUT);
pinMode(_cs_pin,OUTPUT);
if( _reset_pin != 0)
pinMode(ADNS3080_RESET,OUTPUT);
digitalWrite(_cs_pin,HIGH); // disable device (Chip select is active low)
// reset the device
reset();
// start the SPI library:
SPI.begin();
// check the sensor is functioning
if( retry < 3 ) {
if( read_register(ADNS3080_PRODUCT_ID) == 0x17 )
return true;
retry++;
}
return false;
}
//
// backup_spi_settings - checks current SPI settings (clock speed, etc), sets values to what we need
//
byte backup_spi_settings()
{
// store current spi values
orig_spi_settings_spcr = SPCR & (DORD | CPOL | CPHA);
orig_spi_settings_spsr = SPSR & SPI2X;
// set the values that we need
SPI.setBitOrder(MSBFIRST);
SPI.setDataMode(SPI_MODE3);
SPI.setClockDivider(SPI_CLOCK_DIV8); // sensor running at 2Mhz. this is it's maximum speed
return orig_spi_settings_spcr;
}
// restore_spi_settings - restores SPI settings (clock speed, etc) to what their values were before the sensor used the bus
byte restore_spi_settings()
{
byte temp;
// restore SPSR
temp = SPSR;
temp &= ~SPI2X;
temp |= orig_spi_settings_spsr;
SPSR = temp;
// restore SPCR
temp = SPCR;
temp &= ~(DORD | CPOL | CPHA); // zero out the important bits
temp |= orig_spi_settings_spcr; // restore important bits
SPCR = temp;
return temp;
}
// write a value to one of the sensor's registers
void write_register(byte address, byte value)
{
byte junk = 0;
backup_spi_settings();
// take the chip select low to select the device
digitalWrite(_cs_pin, LOW);
// send register address
junk = SPI.transfer(address | 0x80 );
// small delay
delayMicroseconds(50);
// send data
junk = SPI.transfer(value);
// take the chip select high to de-select:
digitalWrite(_cs_pin, HIGH);
restore_spi_settings();
}
// get_pixel_data - captures an image from the sensor and stores it to the pixe_data array
void print_pixel_data(Stream *serPort)
{
int i,j;
boolean isFirstPixel = true;
byte regValue;
byte pixelValue;
// write to frame capture register to force capture of frame
write_register(ADNS3080_FRAME_CAPTURE,0x83);
// wait 3 frame periods + 10 nanoseconds for frame to be captured
delayMicroseconds(1510); // min frame speed is 2000 frames/second so 1 frame = 500 nano seconds. so 500 x 3 + 10 = 1510
// display the pixel data
for( i=0; i
if( isFirstPixel && (regValue & 0x40) == 0 ) {
serPort->println("failed to find first pixel");
}
isFirstPixel = false;
pixelValue = ( regValue << 2);
serPort->print(pixelValue,DEC);
if( j!= ADNS3080_PIXELS_X-1 )
serPort->print(",");
delayMicroseconds(50);
}
serPort->println();
}
// hardware reset to restore sensor to normal operation
reset();
}
bool updateOF()
{
byte motion_reg;
surface_quality = (unsigned int)read_register(ADNS3080_SQUAL);
delayMicroseconds(50); // small delay
// check for movement, update x,y values
motion_reg = read_register(ADNS3080_MOTION);
_overflow = ((motion_reg & 0x10) != 0); // check if we've had an overflow
if( (motion_reg & 0x80) != 0 ) {
raw_dx = ((char)read_register(ADNS3080_DELTA_X));
delayMicroseconds(50); // small delay
raw_dy = ((char)read_register(ADNS3080_DELTA_Y));
_motion = true;
}else{
raw_dx = 0;
raw_dy = 0;
}
last_update = millis();
return true;
}
< APM2.5 보드와 연결시 >
상품의 사용후기를 적어주세요.
게시물이 없습니다


상품에 대해 궁금한 점을 해결해 드립니다.
게시물이 없습니다

법인명(상호) : 한진데이타 대표자(성명) : 김성환 사업자 등록번호 안내 : [122-15-72981] 통신판매업 신고 2022-인천서구-0078 [사업자정보확인]
전화 : 032-565-7590 팩스 : 0505-498-4400 주소 : 22770 인천광역시 서구 청라동 202-5 청라에이스하이테크시티 2동 701호
이메일 : hanjindata@gmail.com 개인정보보호책임자 : 권성윤(hanjindata@gmail.com)
Copyright © 스마트키트. All rights reserved. DESIGN MOON





PLEASE SELECT THE DESTINATION COUNTRY AND LANGUAGE :
